ENCODE aims to investigate the cybersecurity risks associated with multi-driver systems, and implement measures, including secure connectivity, to facilitate safe deployment of such systems. Project work involves engagement with key stakeholders such as DfT and CCAV, to validate and further best practices, and will culminate in a live trial of multi-driver vehicles in London and Oxford to showcase project outcomes.
ENCODE is delivered by StreetDrone (Preston EV Ltd), a leading UK CAV developer, focused on low-speed applications of automation including first-/last-mile deliveries; TRL, safety specialists and key team behind Smart Mobility Living Lab testbed; Coventry University cybersecurity experts; Angoka Ltd, a start-up providing protected communications and Oxfordshire County Council, a leading innovator among local authorities in the adoption of CAV technology.
ENCODE is a collaborative industrial research project, led by Connected and Automated Vehicle (CAV) developer StreetDrone, that aims to reduce time to market for connected and automated vehicle technology in the movement of goods. The project centres on the use of ‘multi-driver’ vehicles, and accompanying security and safety assurance, to enable StreetDrone and the UK to be first to market in the automation of the freight supply chain. A ‘multi-driver’ vehicle is one which can be driven via in-vehicle operator, remote operator, or autonomous driving stack (ADS).
A significant barrier to the widespread deployment of autonomous mobility of people and goods, is achieving the level of technical maturity required to deal with all possible scenarios in the target environments. The range of scenarios to which a CAV can respond under autonomous mode is known as an Operational Design Domain (ODD). If this ODD does not match with the conditions expected in a particular environment (e.g. a busy sub-urban neighbourhood for last-mile deliveries), as the technology is not sufficiently mature, and a safety case cannot be justified, then a vehicle cannot be scalably deployed without safety drivers in situ. “Level 5” deployments (as per the recognised SAE levels) are not therefore possible with current state of the art.
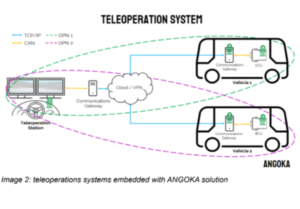
Project ENCODE will alleviate this problem, by examining the safe and secure integration of ‘teleoperation’, the ability for a remote operator to assist a CAV when the situation deems it necessary. Safe and secure teleoperation here allows a remote operator to service multiple vehicles, realising a clear commercial opportunity in cost saving over traditional 1:1 vehicle-driver ratios.
Project Partners
Supported by
StreetDrone
Oxfordshire Couny Council
Coventry University
Angoka
SMLL
StreetDrone
StreetDrone
StreetDrone is accelerating the pace at which autonomous and connected, all-electric vehicle technologies and innovations are transforming the supply chain. By initially deploying our technologies in retail and industrial yards, we are enabling the creation of zero delay, zero accident and zero emission operations within complex business environments.
Oxfordshire Couny Council
OCC
Oxfordshire is home to some of the world’s leading companies in the area of CAVs, including those involved in: vehicle production, software design, testing, cybersecurity, simulation, human-machine interface, public engagement.
Oxfordshire County council are an enabler, advisor and partner in several externally-funded projects, including: road trials, simulation, asset mapping, network management, communications, journey planning, strategic planning.
Coventry University
Coventry University
The Systems Security Group (SSG), part of the Centre for Future Transport and Cities CIFTC), at Coventry University, addresses research problems that lie at the intersection of cybersecurity, systems engineering and computer science in automotive and transport domains.
CFTC at Coventry brings together world class expertise in disciplines across art and design, human factors, engineering, manufacturing, computer science and business studies to deliver our vision of “safe and secure transport solutions fit for the cities of the future”.
Angoka
Angoka
ANGOKA is an IoT security company focused on protecting M2M communications for Smart Cities and Mobility. Headquartered in Belfast, with offices in London and The Hague, ANGOKA offers solutions that protect devices’ identities. With an increase of inherently insecure networks coming online with the boom of IoT, ANGOKA’s solutions safeguard critical machine-to-machine communication integrity and data provenance, creating trusted connections, even in untrustworthy networks. ANGOKA is the only cybersecurity company to win a place on Zenzic’s CAM Scale-Up Programme, delivered in partnership with Plug and Play. ANGOKA is also an alumnus of the UK Government’s National Cyber Security Centre’s Cyber Accelerator, Seraphim Space Camp, Yes!Delft, TechNation Cyber 2.0 and Plug & Play’s Smart Cities programme (Mobility vertical). Additionally, ANGOKA was named one of the UK’s Most Innovative Cyber Security SME by the UK Government and invited to participate in the Northern Irish Business Showcase, hosted by Number 10 Downing Street. Finally, ANGOKA has been awarded several Innovate UK R&D projects, which focus on securing quantum communications (led by BT) and two drone projects. Most recently, ANGOKA was selected for Plug & Play’s Detroit, which aims to further develop innovative Smart Mobility solutions, and awarded the prestigious Technology Innovation Award at ERTICO’s ITS World Congress.
SMLL
SMLL
TRL, originally established in 1933 as the Transport Research Laboratory, has a long history at the forefront of transport innovations, including development of the very first self-driving cars. More recently, TRL has supported updates to the EU General Safety Regulations, facilitating pioneering ‘vehicle-to-grid’ demonstrations, and running HGV platooning trials. For Encode, the team at TRL will apply their safety and compliance expertise to a safety assurance workstream. The project’s public trials in London will be using the infrastructure and monitoring facilities of TRL’s real-world urban testbed, the Smart Mobility Living Lab, to assess the performance and benefits of remotely operated automated mobility services in a complex city environment.
Encode downloads:
As featured in:
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept All”, you consent to the use of cookies. However, you may visit "Cookie Settings" to provide a controlled consent.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duration
Description
cookielawinfo-checkbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checkbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.